Análise de Algoritmos
Ronaldo Cristiano Prati
Bloco A, sala 513-2
ronaldo.prati@ufabc.edu.br
Grafos
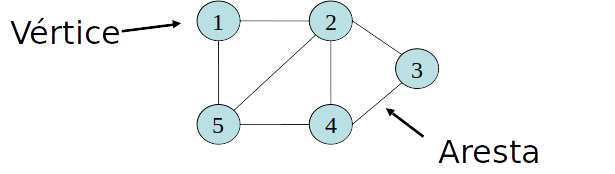
- Um grafo consiste em um conjunto de vértices
e um conjunto de arestas . - Cada aresta corresponde a um par de vértices
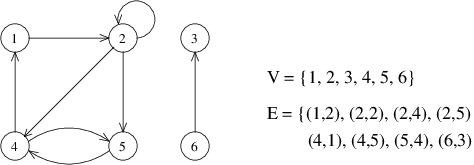
Grafo Direcionado
- Grafo direcionados (digrafo): é um conjunto de pares ordenados (também chamados de arcos) em que
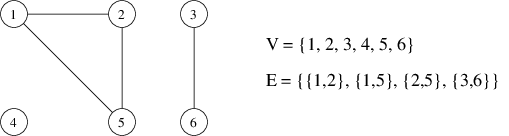
Grafo não-Direcionado
- Grafo não-direcionados: é um conjunto de pares não ordenados de vértices em que
Terminologia
-
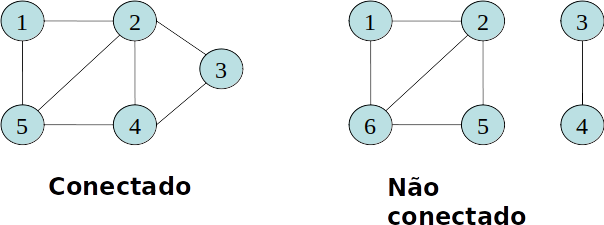
Um grafo é conectado se todo par de vértices é ligado por um caminho
-
Os subgrafos conexos de um grafo desconexo que são maximais com respeito a conectividade são chamadas de componentes conexas
Terminologia
-
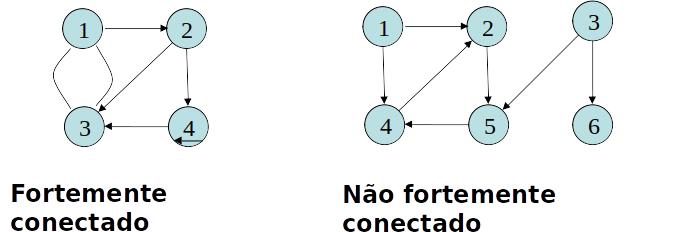
Um grafo direcionado é fortemente conectado se todo o par de vértices é ligado por um caminho
-
Os componentes fortemente conectados de um grafo direcionado são conjuntos de vértices sob a relação “são mutuamente alcançáveis”.
Grafos - Lista de adjacênia
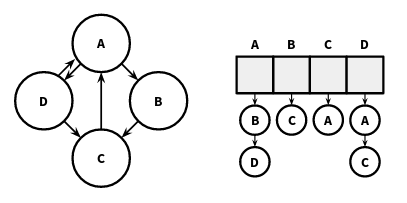
- Para grafos não direcionados, cada nó é representado duas vezes.
- Se o grafo é ponderado, o peso é armazenado juntamente com cada aresta.
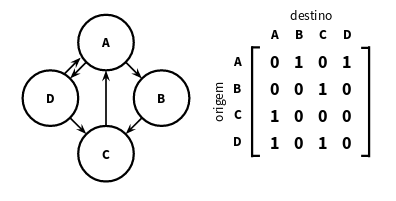
Grafos - Matriz de adjacênia
Grafos - Matriz de adjacênia
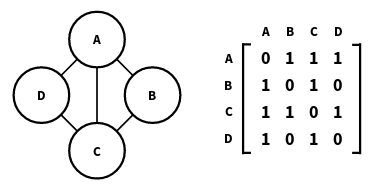
- Para grafos não direcionados, a matriz de adjacênia é simétrica ao longo da matriz diagonal ()
- Se o grafo é ponderado, pesos são armazenados ao invés de 1's
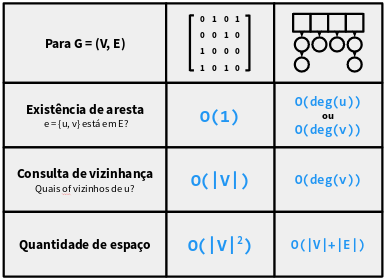
Grafos - Representação
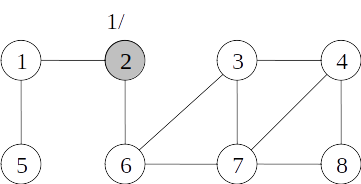
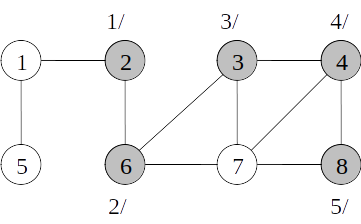
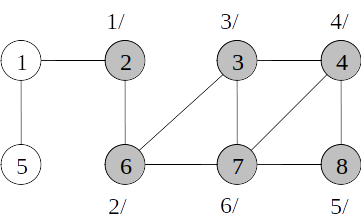
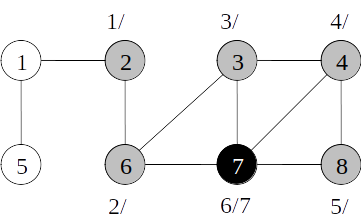
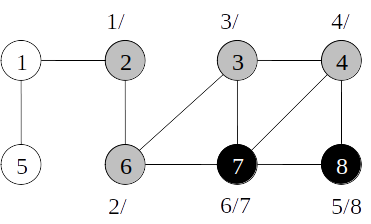
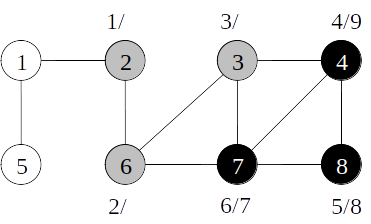
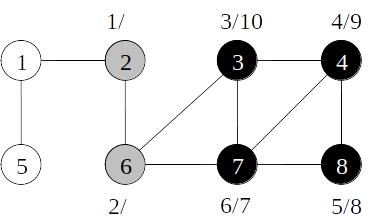
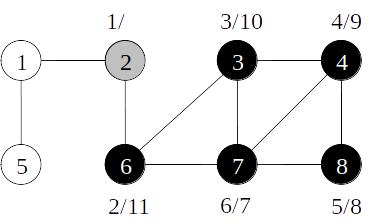
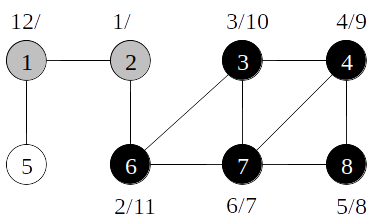
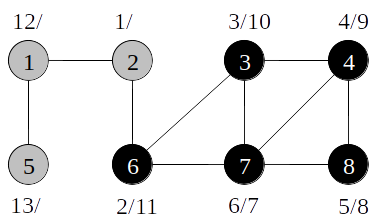
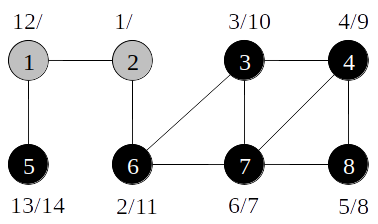
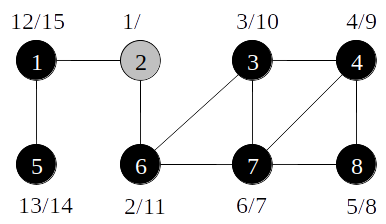
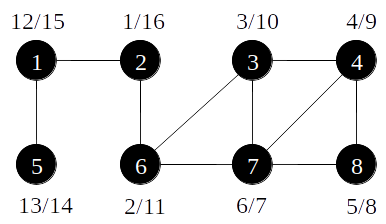
Busca em profundidade
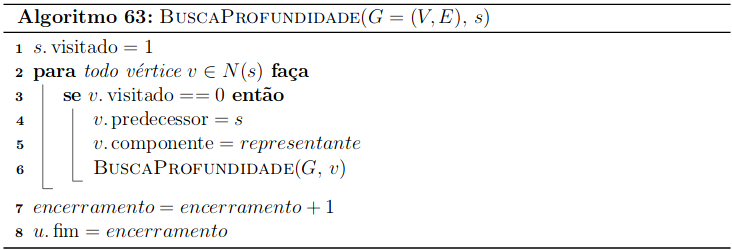
Busca em profundidade
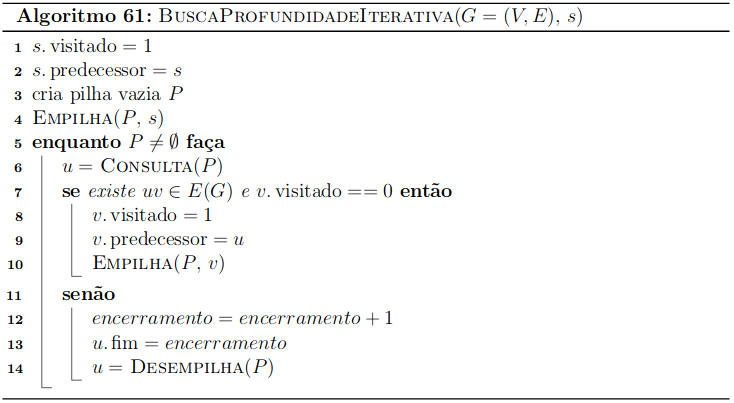
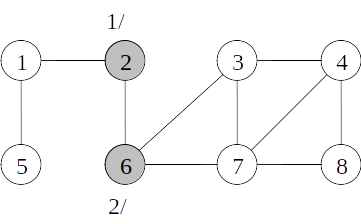
Busca em profundidade
Busca em profundidade
Busca em profundidade
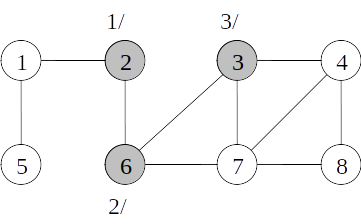
Busca em profundidade
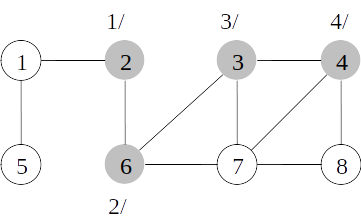
Busca em profundidade
Busca em profundidade
Busca em profundidade
Busca em profundidade
Busca em profundidade
Busca em profundidade
Busca em profundidade
Busca em profundidade
Busca em profundidade
Busca em profu2didade
Busca em profundidade
Busca em profundidade
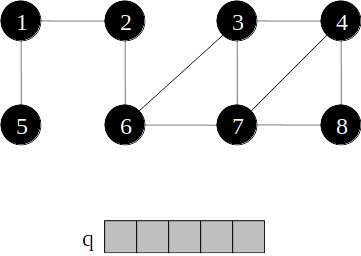
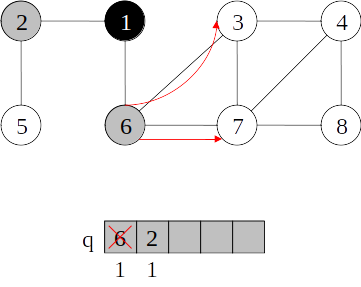
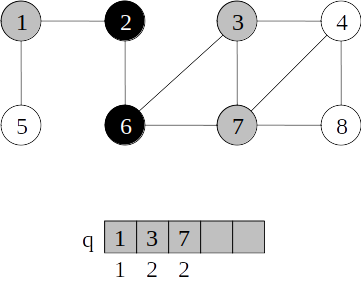
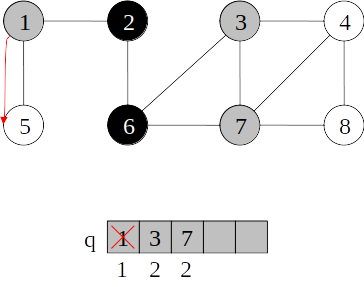
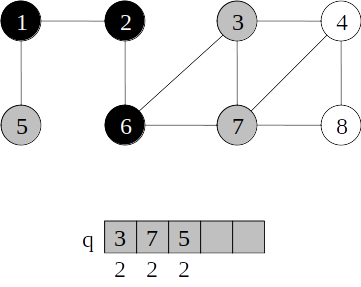
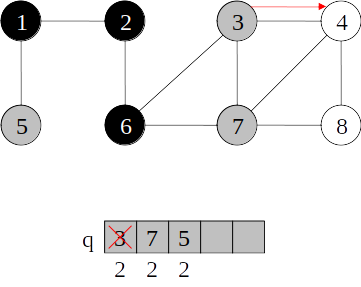
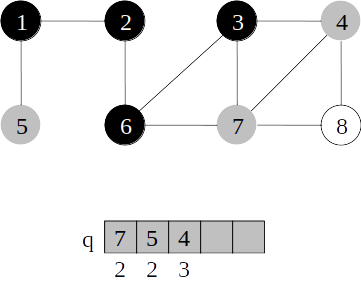
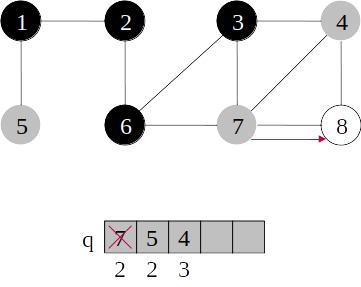
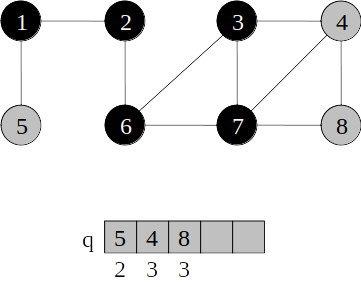
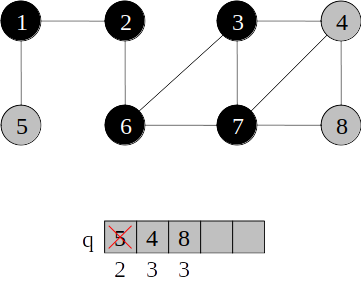
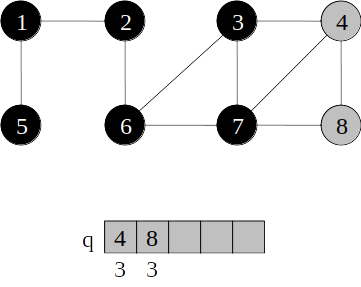
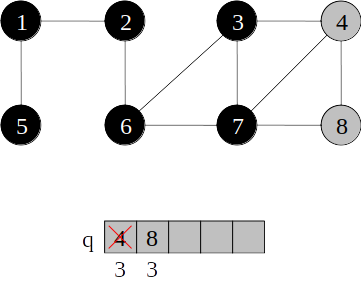
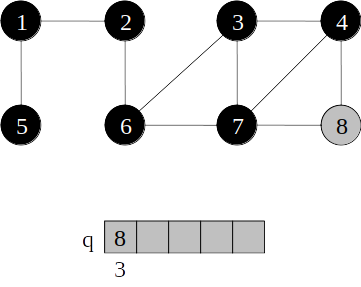
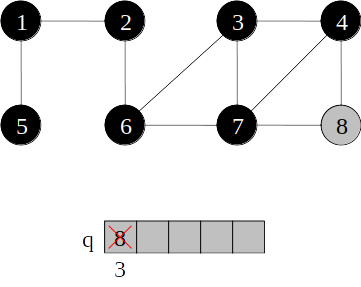
Busca em largura
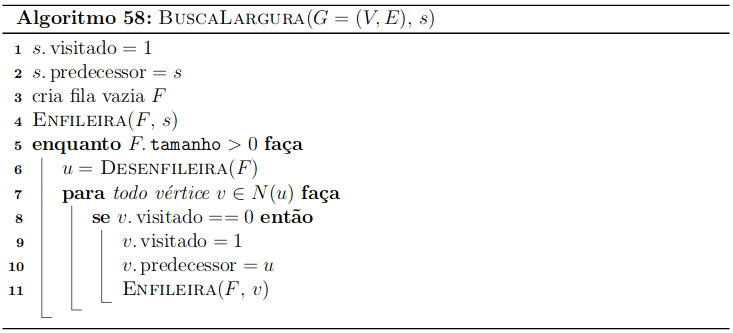
Busca em largura
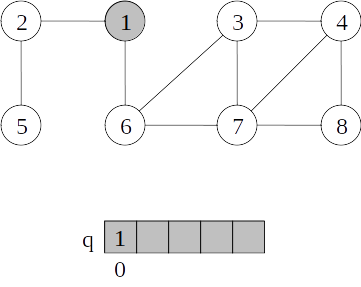
Busca em largura
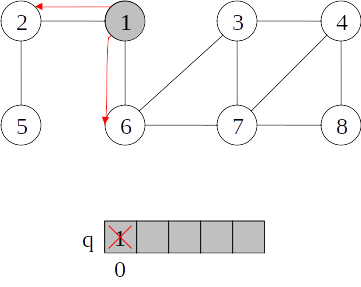
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura
Busca em largura