Robô Seguidor
- Ano: 2021
- Titulo Original: Controle de Robô Seguidor com Acionamento Diferencial
- Modalidade: Trabalho de Conclusão de Curso
- Organização: UFABC
- Autores: Gustavo Silva de Paula, Mario Gazziro
- Anexos:
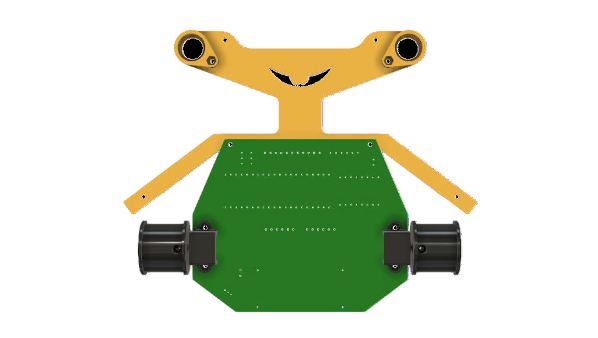
RESUMO: O robô diferencial é composto por dois motores posicionados simetricamente em relação ao eixo, seu deslocamento é dado de forma linear pela velocidade das rodas e angular de acordo com a diferença de rotação entre os motores. Existe um problema de estabilização no robô que consiste em atingir uma dada configuração final desejada que é definida pela localização no espaço cartesiano e uma determinada orientação, para isto é necessário realizar a implementação de um sistema controle para otimizar o problema de estabilização. Este trabalho realiza a implementação da modelagem cinemática e dinâmica de um robô diferencial baseado na literatura já existente, projeta e desenvolve um robô seguidor de linha com acionamento diferencial para competições de robótica, implementa um sistema de controle PD e otimiza o rendimento do robô em um percurso por meio do mapeamento de pista. Para atingir os objetivos propostos foram realizadas pesquisas sobre modelagem cinemática e entendido os diferentes parâmetros que afetam o desempenho do robô. Em seguida foi desenvolvido o projeto do robô por modelagem mecânica 3D, modelagem elétrica e modelagem dinâmica do sistema de controle PD. Posteriormente foi implementado o protótipo e otimizado com um firmware capaz de realizar o mapeamento de pista. Por fim, o robô foi testado em competições de robótica sendo capaz de conquistar 2 troféus, validando toda implementação.
ABSTRACT: The differential robot consists of two motors positioned symmetrically in relation to the shaft, its displacement is given linearly by the speed of the wheels and angular according to the difference in rotation between the motors. There is a stabilization problem in the robot that consists of achieving a given desired final configuration that is defined by the location in Cartesian space and a certain orientation, it would be necessary to implement a control system to optimize the stabilization problem. This work performs the implementation of the kinematic and dynamic modeling of a differential robot based on existing literature, designs, and develops a line follower robot with differential drive for robotics competitions, implements a PD control system and optimizes the robot's performance in a path through track mapping. To achieve the proposed objectives, research was carried out on kinematic modeling and understood the different parameters that affect the performance of the robot. In the next steps, the robot was designed y 3D mechanical modeling, electrical modeling, and dynamic modeling of the PD control system. Subsequently, the prototype was implemented and optimized with a firmware capable of performing the track mapping. Finally, the robot was tested in robotics competitions wining 2 trophies, validating all implementation.